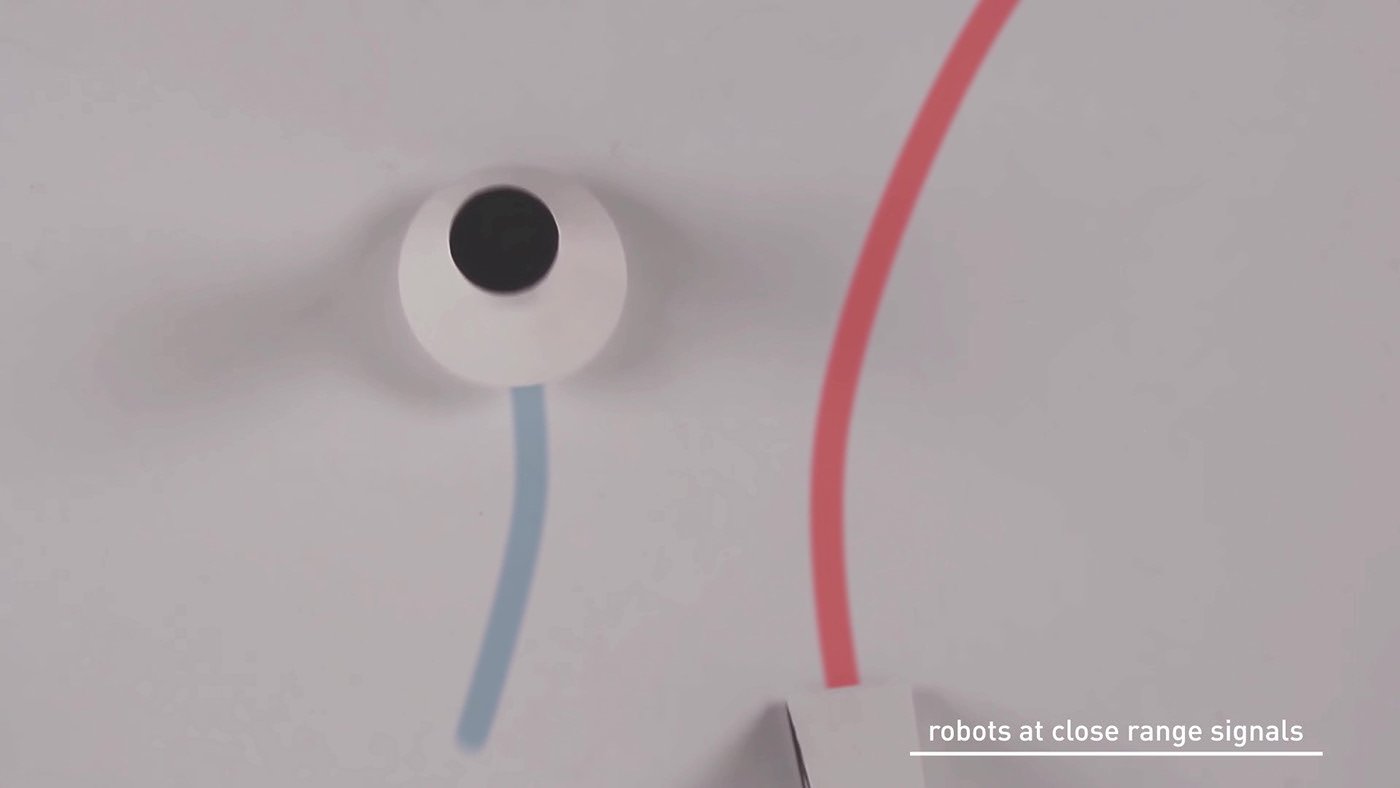

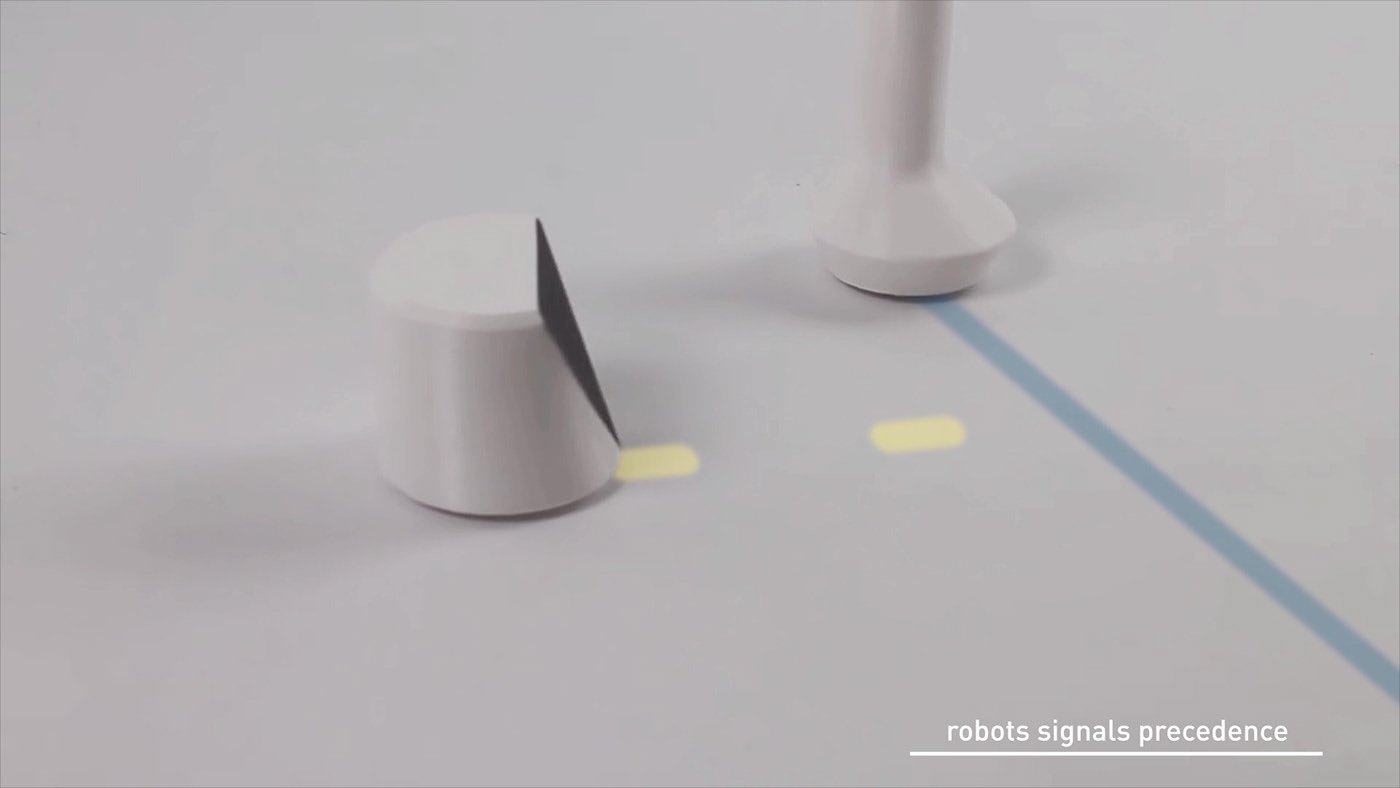
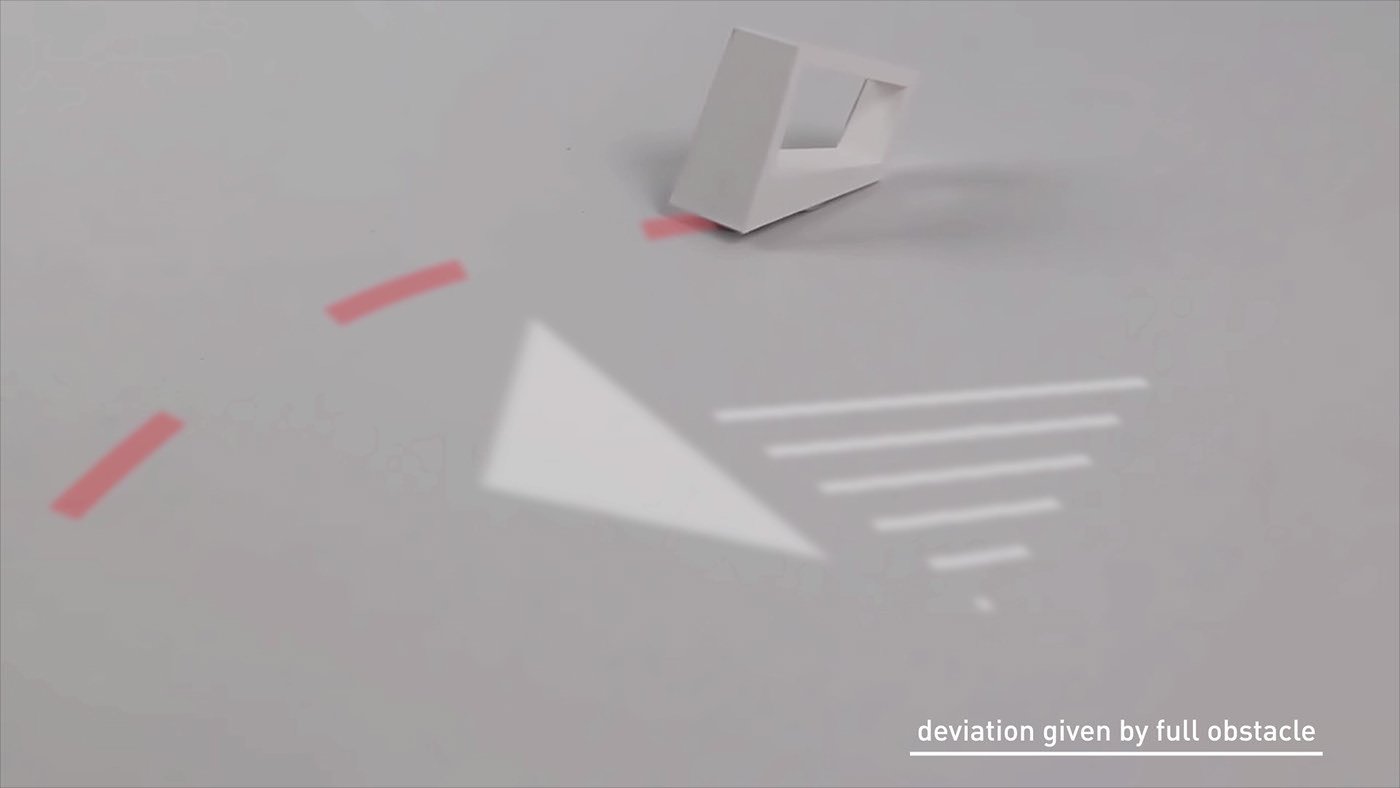
Precode è un’ipotesi di sistema visivo per la codifica di movimenti tra robot proiettata a terra. Il progetto mostra come elementi diversi nella forma e nell'identità possano coesistere ed interagire all'interno di uno spazio potenzialmente variabile. Gli ostacoli evidenziano un tipo di variabilità e sono indicati come dei pittogrammi digitali con forme geometriche o pattern proiettati sul piano.
Direzione e comportamento sono quindi i parametri previsionali del sistema rappresentati nella segnaletica che le persone possono decifrare per poter interagire al meglio nello stesso spazio.